


Ca y est je me suis décidé à me lancer dans l'aventure des objets volants non identifiés ou plutot appelé drones, mon choix c'est donc porté sur le Tricoptère plutot que le quadracoptére ou Xcoptére car la maniabilité du tri est accrue, et il est donc putot asser vif ce qui est bien pour faire de la voltige mais il est donc moin stable également qu'un 4 ou 6 rotor forcément!!! La différence est aussi que avec 6 rotors ou plus la sécurité est bien plus grande en cas de panne d'un des moteurs alors qu'avec 3 ou 4 c'est le crash assuré !!!
Voici donc la confection de la frame centrale (chassis) en aluminium car plus solide et de meme poids que la fibre !


Pour les bras j'ais choisis du tube carré de 1x1cm ext en aluminium et égalementtoujours pour des raisons de soliditée.
Le rayon sera de 40cm de l'axe moteur au centre de la frame, bien entendu plus le rayon est grand plus il est stable et inversement.

J'ais bien sur pensé à le rendre pliable pour le transport grasse à un système de goupilles car une foi déployé il s'avère asser imposant !!!

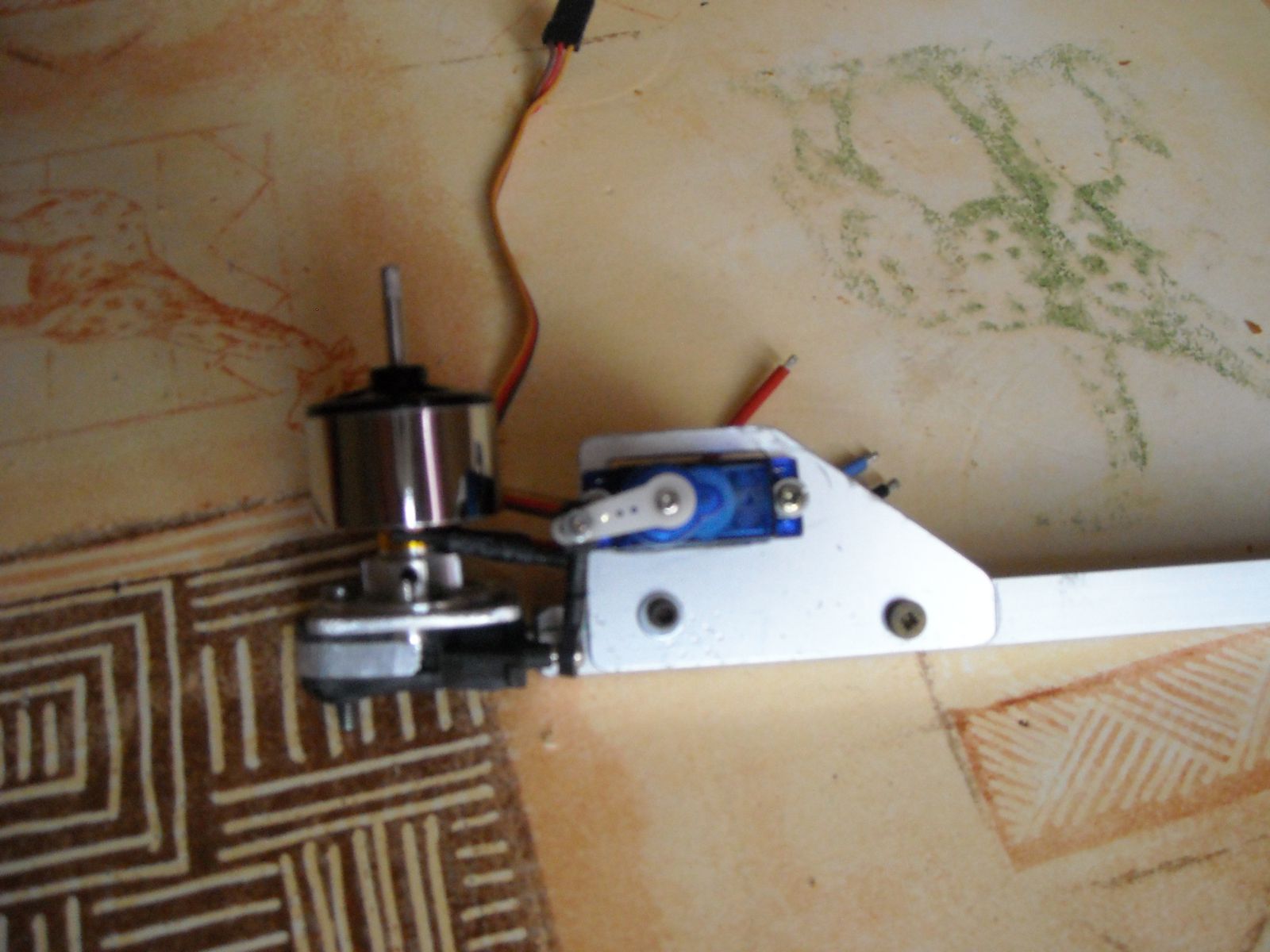
Vient ensuite la confection de l'articulation du 3éme moteur, pour ce faire un pied de pale de t-rex450 ma semblé idéal simple et léger .
Confection d'une cale en alu au centre de celui-ci et mise en place avec blocage par ecrou de l'axe de pied de pale dans le tube.

Confection des 3 platines porte moteur à l'identique et mise en place sur les bras en fixant également avec les embases de moteur.

Ensuite vient la fabrication de la platine du servo de commande du 3ème moteur ainsi que l'instalation du servo (j'ai opté pour un 9g blue bird digital avec pignons métal de chez hobbycity à 6$) puis du moteur définitif (là mon choix c'est arrèté sur le Turnigy 2213N 800Kv pesant 53g et dévellopant une poussée de 690g) puis de la commande pour ce faire j'ai pris une commande de pied de pale de t-rex450.


Voici une photo de l'ensemble en attendant de recevoir la suite de la commande de chez hobbycity avec la partie électronique!!!

Ca y est la commande de chez hobbycity est enfin arrivée mais oh surprise désagréable une taxe de douane à payé : 11,30€ sur une commande de 50€ , décidément l'état à vraiment besoin d'argent!!!
Bon bref, débalage puis instalation des hélices tripales avec leur adaptateur, j'ai obté pour ce mode de fixation de l'hélice car plus fiable en vol que les prop saver à élastique (une hélice qui part et c'est le crash car ca ne plane pas ces engins là !!!) par contre en cas de crash l'axe moteur en prend un coup !!!

Puis vient l'instalation de la carte KK Multicopter sur la frame

Je pense que je garderais la mousse de protection de la carte qui servais à l'emballer pour la protéger des chocs éventuels !


Présentation et instalation entre les 2 frame du chassi des controleurs moteur en prenant soins de faire attention à ce que lors du pliage des bras celà ne coupe pas un cable !


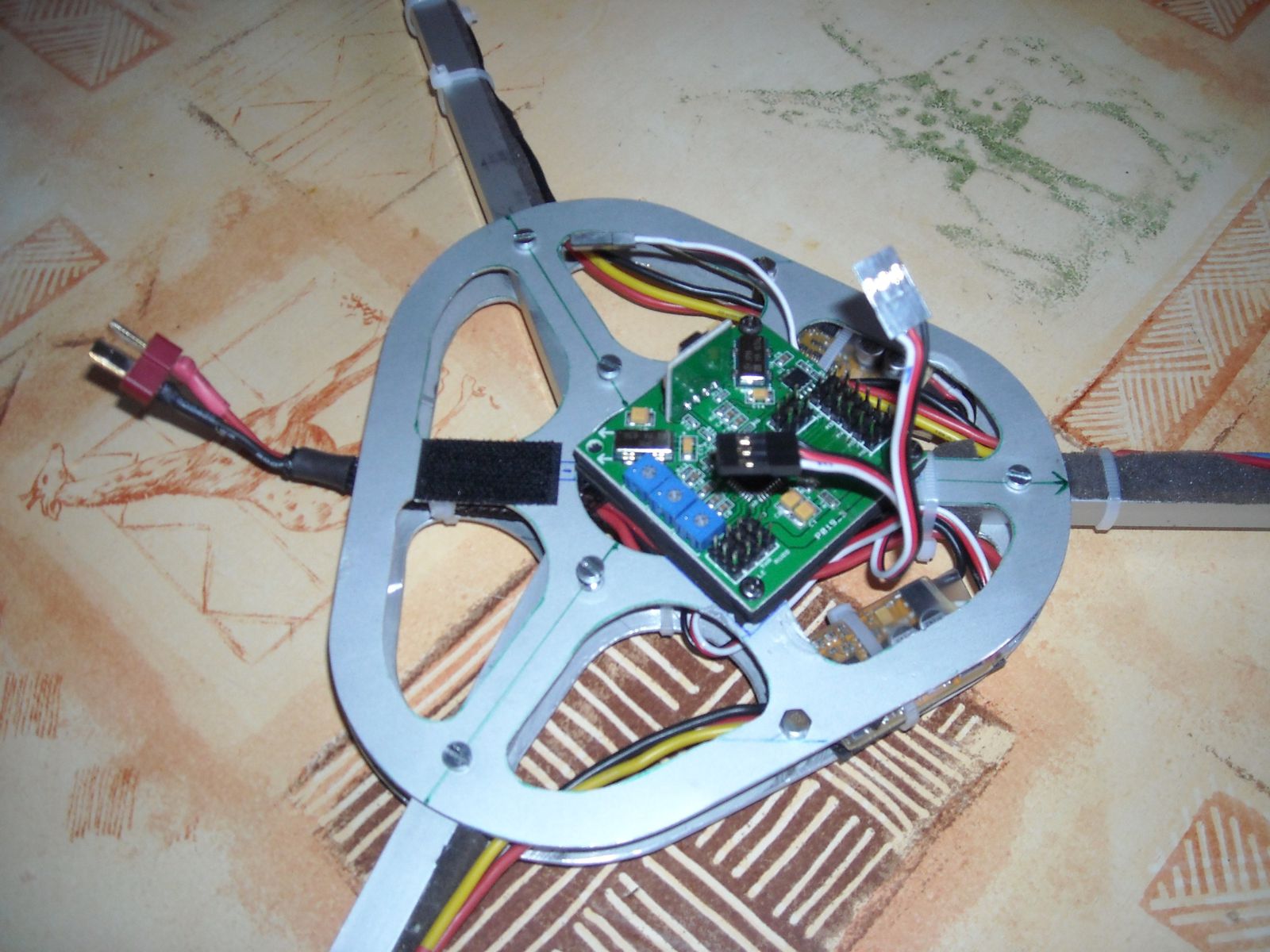
Cablage des moteur en pensent bien à respecter les couleurs pour 2 moteur et inversion de 2 couleurs sur le 3 eme pour qu'il tourne à l'envers.

Pour les pied j'ai pris comme modèle une partie de la dérive d'un T-Rex600 comme modèle et je l'est reproduit en 3 exemplaires en duralumin.


Voici la vidéo du 1er vol après avoir passer plus d'une journée de recherches pour savoir comment faire pour reprogramer la carte de controle en version Tricopter . La vidéo manque parfoi le tricoptére car la caméra était fixé sur la radio donc pas évidant de viser, mais je vais me confectionner une casquette porte camera !!!








Evidament les hélices ont été vérifiées également et il s'avere que une des trois en avait vraiment besoin, voir méthode sur la vidéo:
Apres équilibrage des moteurs et des hélices celà n'a plus rien à voir et il a meme plus de patatte en vol !!! J'ai donc décidé ensuite de fabriquer le support de batterie qui servira en meme temps pour la camera, l'avantage de ce support est qu'il permet d'ajuster au plus précis le centre de gravité du tricoptère en avancant ou en reculant la batterie.



Voici donc l'aspect générale avec la batterie et avec la camera et son pied et quelques autres photos de l'ensemble fini montrant les diverses position de la camera.












/image%2F1217393%2F20151210%2Fob_778061_zmr250-cad-top14.png)
/http%3A%2F%2Fwww.hobbyking.com%2Fhobbyking%2Fstore%2Fcatalog%2F25432.jpg)
/https%3A%2F%2Fassets.over-blog.com%2Ft%2Fcedistic%2Fcamera.png)

 puget3d.over-blog.com
puget3d.over-blog.com